
Wie können wir helfen?
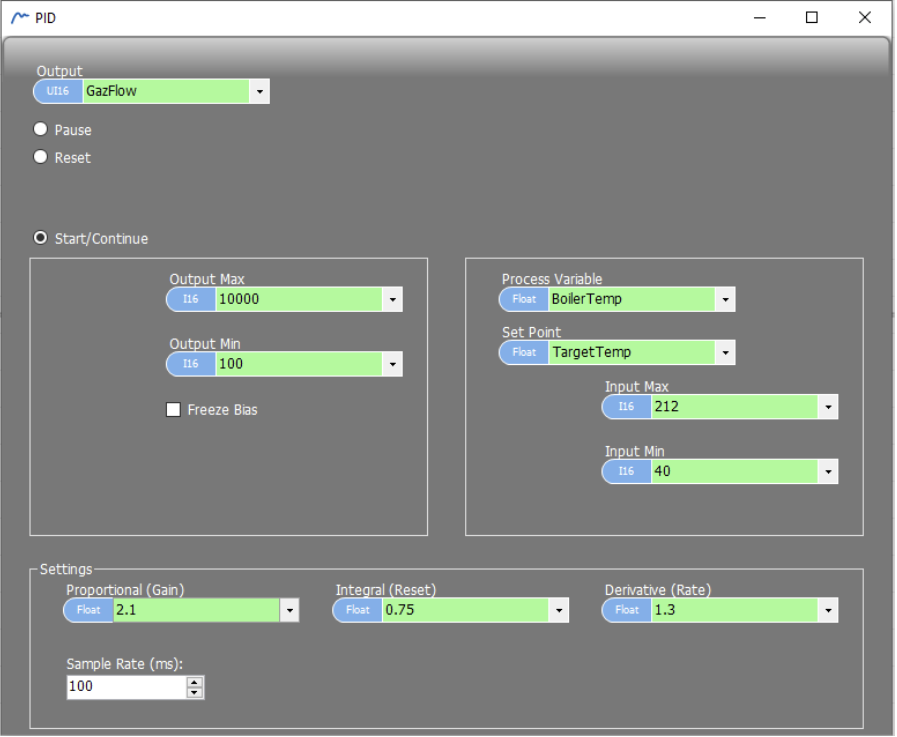
PID, wie stelle ich es ein? PID-Einstellung an einer ACE SPS
Schnelle Einstellmethode
|
 |
P = Proportional (Reaktionsstärke)
Multipliziert die Abweichung zwischen Sollwert und Istwert. Bestimmt, wie stark die Korrektur angewendet wird.
P steuert die Stärke der in jedem Moment angewendeten Korrektur. Bei großer Abweichung korrigiert P stark, bei kleiner Abweichung schwach. Optisch ähnelt es einer Rampe, technisch gesehen ist es jedoch eine fehlerbasierte Verstärkungsregelung.
- Zu niedrig → träge, langsame Reaktion.
- Zu hoch → System schwingt und pendelt
- Hoch starten, verringern bis Schwingungen aufhören

I = Integral (Korrektur des bleibenden Regelfehlers, kleine Schwankungen um den Sollwert)
Summiert den Fehler über die Zeit, um die kleine bleibende Abweichung zu eliminieren, die P allein nicht beheben kann.
- Zu niedrig → System schwingt langsam um den Sollwert
- Zu hoch → langsame Stabilisierung
- Schrittweise erhöhen, um Schwingungen um den Sollwert zu reduzieren

D — Differential (Vorausschau)
Reagiert auf die Änderungsgeschwindigkeit des Fehlers. Bremst die Korrektur, wenn sich der Wert schnell dem Sollwert nähert, um Überschwingen zu verhindern.
- Zu hoch → instabil, verstärkt Signalrauschen
- In den meisten industriellen Anwendungen auf 0 lassen
