
Comment pouvons-nous aider ?
PID, comment le régler ? Réglage PID sur un automate ACE
Méthode de réglage rapide
|
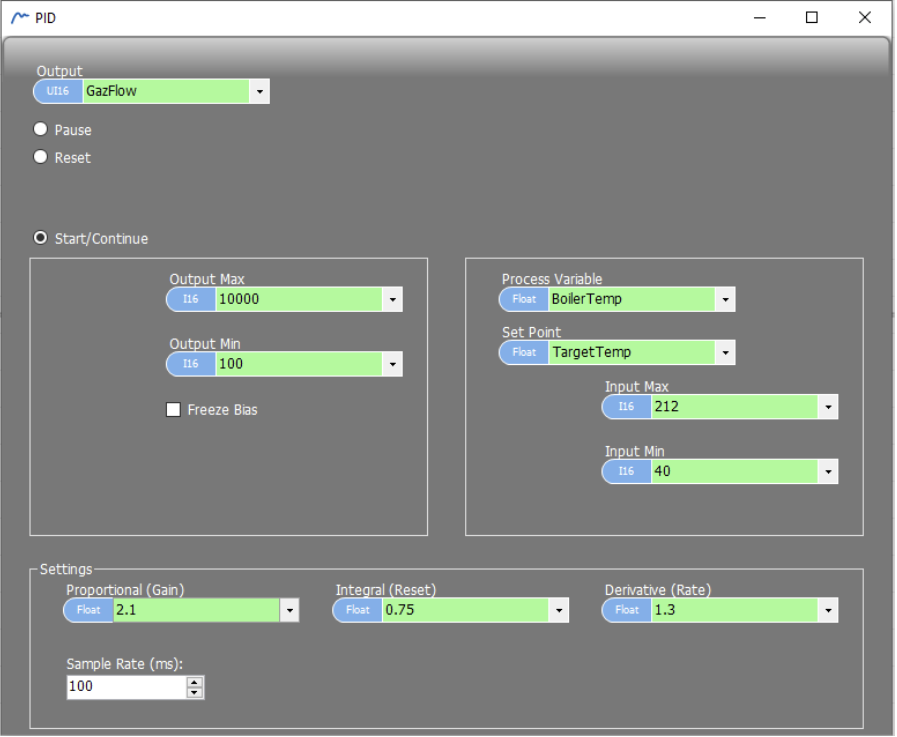 |
P = Proportionnel (force de réaction)
Multiplie l’écart entre la consigne et la valeur réelle. Contrôle la force de la correction appliquée.
P contrôle l’amplitude de la correction appliquée à chaque instant. Si l’écart est grand, P applique une correction forte. Si l’écart est faible, P applique une correction faible. Visuellement, cela ressemble à une rampe, mais techniquement c’est un contrôle par gain sur l’erreur.
- Trop faible → réponse molle et lente.
- Trop fort → le système oscille et chasse
- Commencer haut, diminuer jusqu’à ce que les oscillations s’arrêtent

I = Intégral (correction de l’écart résiduel, petites fluctuations autour de la consigne)
Accumule l’erreur dans le temps pour éliminer le petit écart persistant que P seul ne peut pas corriger.
- Trop faible → le système oscille lentement autour de la consigne
- Trop fort → long à se stabiliser
- Augmenter progressivement pour réduire les oscillations autour de la consigne

D — Dérivé (anticipation)
Réagit à la vitesse de variation de l’erreur. Freine la correction lorsque la valeur s’approche rapidement de la consigne, évitant le dépassement.
- Trop fort → instable, amplifie le bruit du signal
- Dans la plupart des applications industrielles, laisser à 0
