
Hoe kunnen we helpen?
PID, hoe stel ik het in? PID-afstelling op een ACE PLC
Snelle afstelmethode
|
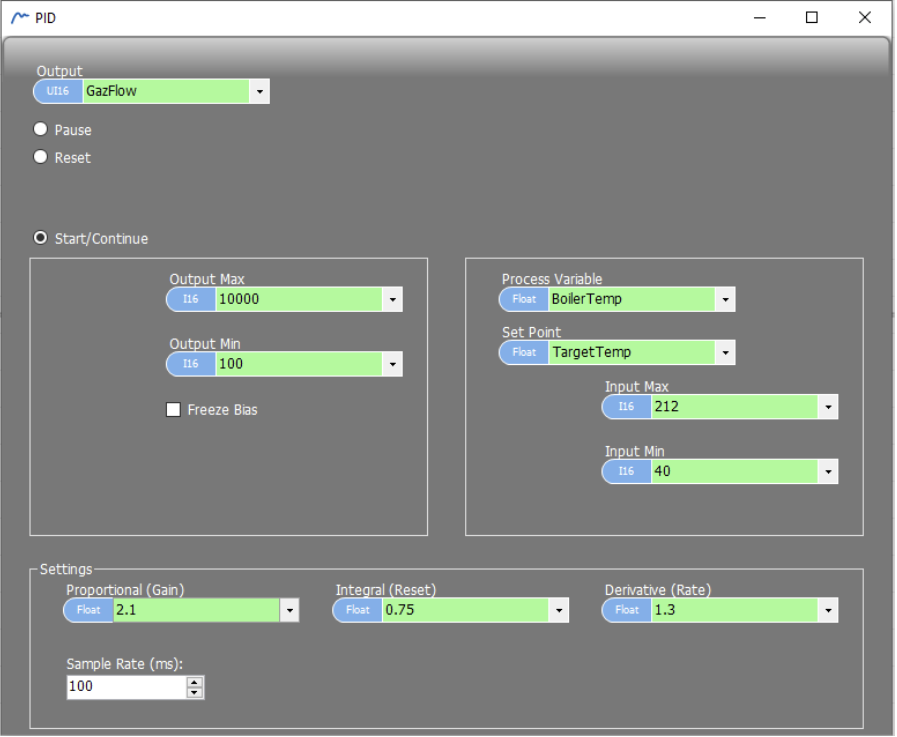 |
P = Proportioneel (reactiesterkte)
Vermenigvuldigt de afwijking tussen de setpoint en de werkelijke waarde. Bepaalt hoe sterk de correctie wordt toegepast.
P bepaalt de sterkte van de correctie die op elk moment wordt toegepast. Bij een grote afwijking past P een sterke correctie toe. Bij een kleine afwijking een zwakke correctie. Visueel lijkt het op een helling, maar technisch gezien is het een versterkingsregeling op de fout.
- Te laag → trage, slappe reactie.
- Te hoog → het systeem oscilleert en jaagt
- Hoog starten, verlagen tot oscillaties stoppen

I = Integraal (correctie van blijvende afwijking, kleine schommelingen rond de setpoint)
Accumuleert de fout in de tijd om de kleine blijvende afwijking te elimineren die P alleen niet kan corrigeren.
- Te laag → het systeem oscilleert langzaam rond de setpoint
- Te hoog → langzaam stabiliseren
- Geleidelijk verhogen om oscillaties rond de setpoint te verminderen

D — Differentiaal (anticipatie)
Reageert op de snelheid van de foutverandering. Remt de correctie af wanneer de waarde snel de setpoint nadert, om overshoot te voorkomen.
- Te hoog → instabiel, versterkt signaalruis
- In de meeste industriële toepassingen op 0 laten staan
