
¿Cómo podemos ayudar?
PID, ¿cómo se ajusta? Ajuste PID en un PLC ACE
Método de ajuste rápido
|
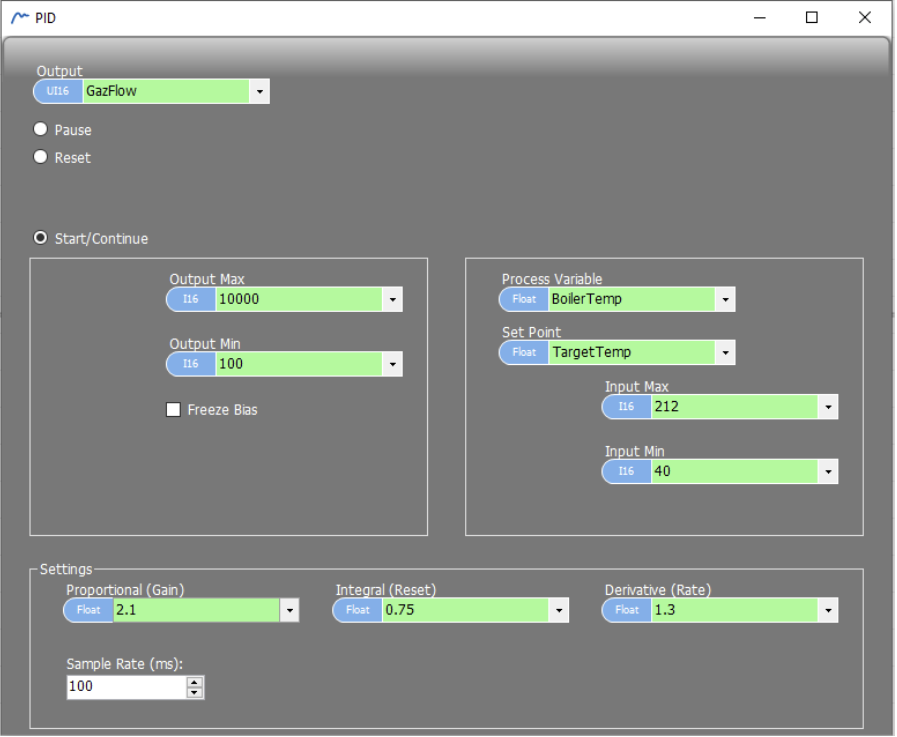 |
P = Proporcional (fuerza de reacción)
Multiplica la desviación entre el setpoint y el valor real. Controla la intensidad de la corrección aplicada.
P controla la amplitud de la corrección aplicada en cada momento. Si la desviación es grande, P aplica una corrección fuerte. Si la desviación es pequeña, P aplica una corrección débil. Visualmente se asemeja a una rampa, pero técnicamente es un control de ganancia sobre el error.
- Demasiado bajo → respuesta lenta y débil.
- Demasiado alto → el sistema oscila y caza
- Empezar alto, disminuir hasta que las oscilaciones se detengan

I = Integral (corrección del error residual, pequeñas fluctuaciones alrededor del setpoint)
Acumula el error en el tiempo para eliminar la pequeña desviación persistente que P solo no puede corregir.
- Demasiado bajo → el sistema oscila lentamente alrededor del setpoint
- Demasiado alto → tarda en estabilizarse
- Aumentar gradualmente para reducir las oscilaciones alrededor del setpoint

D — Derivativo (anticipación)
Reacciona a la velocidad de variación del error. Frena la corrección cuando el valor se acerca rápidamente al setpoint, evitando la sobreoscilación.
- Demasiado alto → inestable, amplifica el ruido de la señal
- En la mayoría de aplicaciones industriales, dejarlo a 0
