
How Can We Help?
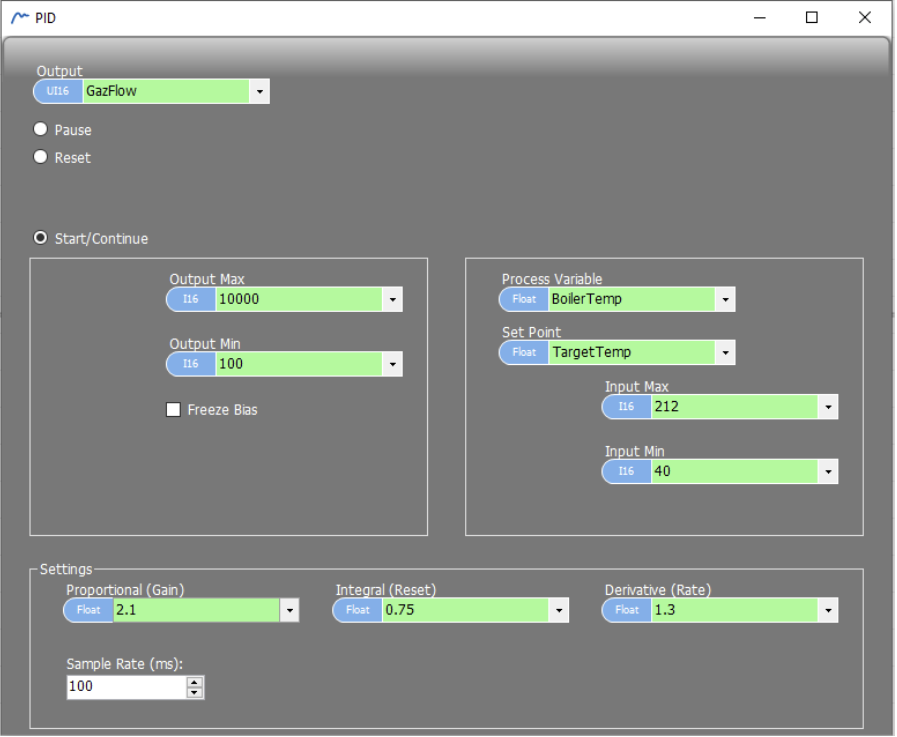
PID, How do I adjust it? PID Tuning on a ACE PLC
Quick Tuning Method
|
 |
P = Proportional (reaction strength)
Multiplies the error between setpoint and actual value. Controls how hard the correction is applied.
P controls the magnitude of the correction applied at any given moment. If the deviation is large, P applies a strong correction. If the deviation is small, P applies a weak correction. Visually, it resembles a ramp, but technically it is a gain-on-error control.
- Too low → slow, sluggish response.
- Too high → system oscillates and hunts
- Start high, decrease until oscillation stops

I = Integral (residual error correction, small fluctuations around the set point)
Accumulates error over time to eliminate the small persistent gap that P alone can’t fix.
- Too low → system oscillates slowly around setpoint
- Too high → slow to stabilize
- Increase gradually to reduce oscilliation arround the setpoint

D — Derivative (anticipation)
Reacts to the speed of the error change. Brakes the correction when the value approaches the setpoint fast, preventing overshoot.
- Too high → unstable, amplifies signal noise
- In most industrial applications, leave it at 0
